Ученые университета науки и технологий МИСИС предложили методику, по которой можно заранее рассчитывать зоны и траектории, чтобы автоматизированные комплексы планировали действия без лишних остановок, перенастроек и столкновений.
— Мы разработали специальные алгоритмы, которые позволяют коллаборативным роботам точно двигаться в ограниченном пространстве. Эти программы заранее рассчитывают, где и как каждый манипулятор должен двигаться, чтобы выполнить свою задачу наиболее эффективно. Внимание мы заострили на построении «зон безопасной работы» — невидимых границ в пространстве, внутри которых нет риска столкновений, — рассказал доцент кафедры автоматизированных и информационных систем управления СТИ НИТУ МИСИС Сергей Халапян.
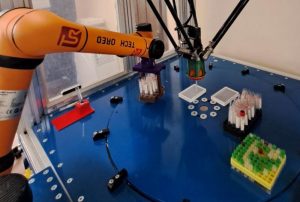
С помощью компьютерных моделей исследователи выяснили, каким образом могут безопасно двигаться два манипулятора: один дозирует жидкость, другой подает пробирки. В расчетах учитывали все элементы окружения, рассказали на сайте университета.
Кроме того, ученые создали систему автоматического смещения точки взаимодействия в зависимости от загрузки каждого манипулятора. Это позволило сократить общее время выполнения цикла.


